The objective of the Map Making use case is to create “map-ready” features derived from some upstream process and enrich TomTom’s core map feature set by ingesting those features. In addition to generating "map-ready" land cover (LC) features for updating and visually improving TomTom’s Core Map, extraction performed at 10 m resolution—although sometimes insufficient for creating features at the highest zoom levels—can still be utilized to identify locations where existing features may have changed and maps should be updated. Upon detecting such alterations, these leads can be supplied to editors for updating the product, accordingly, utilizing GEM's drill-down capabilities.
To achieve this objective, a dedicated pipeline based on LC-CMS pipeline was built, capable of detecting water features. The pipeline was used to perform water features/extraction on several areas, based on the internal TomTom use case. The results have been demonstrated in the region of Myanmar and parts of Chile. Myanmar was also used for experimentation, finalizing input bands, and evaluating post-processing and vectorization techniques. So, the viewer may have more layers for Myanmar than Chile Subregion.
We demonstrate the results obtained in the Map Making use-case in a lightweight web demonstrator app:
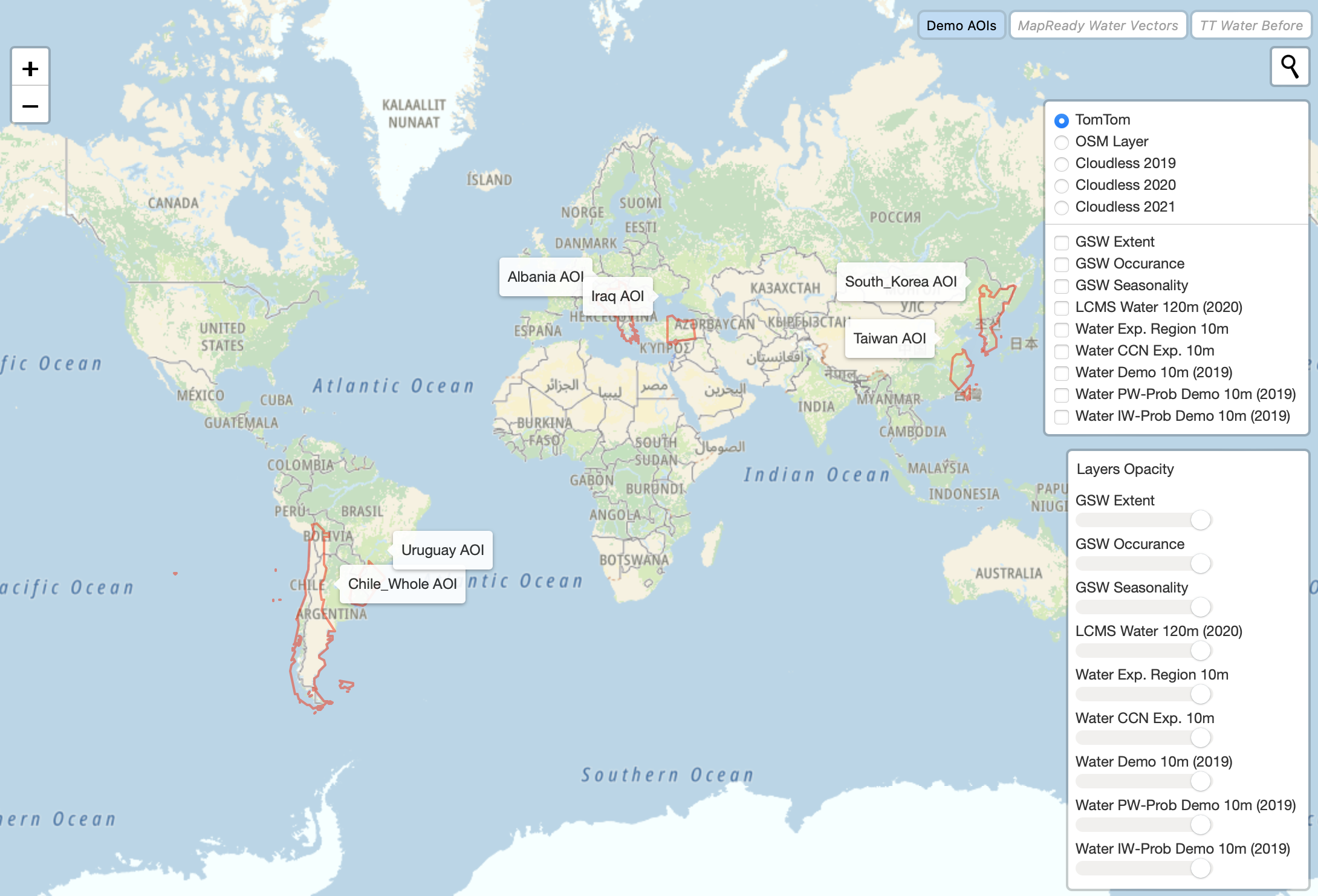
Map Making Viewer is very useful for visualizing the results generated as a part of Map Making use-case. The viewer has the following features:
- Layer Selection: At the top right side of the app, there is a layer panel with the list of layers which can be visualized in the viewer. The checked layers will be visualized and rendered in the order they are appear in the list. So, if the only first checkbox is checked, it will be displayed on the map, but if both the first and the third checkboxes are checked, they will both be rendered, but only third will be visible as it is rendered on top of the first. All layers will be rendered on top of the base map, which can be changed using radio buttons.
- Layer Opacity: When a layer is selected, it can be made opaque by dragging the slider to the left shown with the layer name in the opacity control. When a layer is opaque, the layer rendered right underneath it, will be visible. If no other layer is selected, then base map is shown.
- Vector Layer buttons: Some Vector layers also present in the map and can be selected by clicking the buttons present on the top right-hand corner of the page. They are always rendered on top of all the existing layers.
- Address Search: There’s a search bar icon on the top right-hand corner that enables searching for any address on the map. This is usually helpful when you need to navigate quickly to a location.
- Zoom Control: There are zoom control buttons on the top left-hand corner to zoom in and out of the map.
- Map Legend: Information about the colours used to represent land cover can be viewed by clicking on the map legend button at the bottom right. The same colour can mean different things depending on the type of layer, so it is best to check the legend.
The types of layers shown on the map are:
- Results Layer: Raster prediction results
- Vector Layer: Vectorized results or AOI (Area of Interest) reference
- Validation Layer: Results from other vendors for comparison
- Reference Layer: Base map or satellite imagery to show ground truth
The following table list and describes all the layers for the Water Viewer
|
Layer Name |
Layer Type |
Description |
|
WaPr 60, |
Results Layer (Prediction) |
Prediction results for the Myanmar experiment region performed by Water Predictor pipeline using S2 at 120m, 20m and 10m resolution for the year 2020 |
|
WaPr 10m FED |
Results Layer (Prediction) |
Prediction results for the Myanmar and Chile demonstration region performed by Water Predictor pipeline feature engineering on 10m resolution for the year 2020 (Myanmar) and 2021 (Chile) |
|
WaPr 10m CNN |
Results Layer (Prediction) |
Prediction results for the Myanmar and Chile demonstration region performed by Gap Filling CNN Segmentation model defined in section 4.3on 10m resolution for the year 2020 (Myanmar) and 2021 (Chile) |
|
WaPr 10m, |
Vector Layer |
Vector layers showing vectorized results for ingestion in TomTom’s core map generated using 10m resolution S2 L2A and 20m resolution S2 L2A. |
|
WaPr Change 2019-2022 |
Results layer (Change Detection) |
Change detection by comparing predictions performed by LC-CMS pipeline using S2 at 120m for 2019 and 2022 for drying lakes in Iran and Iraq. |
|
GSW* |
Validation Layer |
GSW Layers form the open sourced Global Surface Water Explorer (global-surface-water.appspot.com) |
|
TomTom Base Map |
Reference Layer |
TomTom base map raster layer. |
|
Reference Layer |
OSM (Open Steet Map) raster base map layer. |
|
|
Cloudless Satellite Imagery |
Reference Layer |
Pre-processed Cloudless Viewing Ready (RGB) global product created from Sentinel-2 mission for years 2019, 2020, 2021. |
